![]()
Article Menu
/ajax/scifeed/subscribe
Open Access Article
De Re Metallica: An Early Ergonomics Lesson Applied to Machine Design in the Renaissance
1
Department of Civil, Materials and Manufacturing Engineering, Industrial Engineering School, Universidad de Málaga, E-29071 Málaga, Spain
2
Department of Construction and Manufacturing Engineering, Industrial Engineering School, Universidad Nacional de Educación a Distancia (UNED), E-28040 Madrid, Spain
*
Author to whom correspondence should be addressed.
Academic Editor: Asterios Bakolas
Received: 5 July 2021 / Revised: 31 August 2021 / Accepted: 3 September 2021 / Published: 6 September 2021
Abstract
The Renaissance treatise De Re Metallica (Georgius Agricola, 1556) is one of the first works that deals in detail with the state of the art of metal mining, compiling the main techniques and mechanical devices used in this industrial activity at that time. An advanced knowledge of the human–machine set is observed in this treatise, from a mechanical and ergonomics point of view. The main objective of this work is to carry out an ergonomics analysis of one of the mechanical devices collected in the sixth book of this treatise. It is intended to show that there was a certain concern for ergonomics in the Renaissance, long before the first appearance of this concept. Specifically, a mine water extraction pump, powered by three different systems, is analyzed. Current ergonomics assessment methods have been used to perform this comparative analysis. The postural load has been assessed by the rapid upper limb assessment (RULA) and the rapid entire body assessment (REBA). The Check List OCRA (occupational repetitive action) has been used to perform the analysis of repetitive movements. The results have shown an evolution of the machine, not only on a mechanical level, but also in movements, postures, and safety of the operator for the three methods applied. It is, therefore, an example of practical and real ergonomics applied to machine design dating from the 16th century. In addition, this work may be a very interesting tool for teaching, since it allows showing examples of ergonomics in productive areas related to historical context.
1. Introduction
Mining and the transformation of metals through metallurgical processes were among the main industrial activities (intensive, technical and professionalized) in Renaissance Europe in the 16th century [1]. Such intense mining-metallurgical activity has resulted in an extensive and valuable industrial heritage (extraction elements, transport, storage, transformation, auxiliary buildings…) which is in danger after the progressive closure of many mining basins [2]. This industrial heritage is related to the economic value associated to some movable and immovable assets [3,4]. Therefore, it includes not only archaeological or architectural elements [5], but also technological ones, which must be protected, recovered and valued [6,7]. In fact, factories and mining areas reclaimed for tourism are one of the most visible and recent facets of new cultural trends [8,9].
The technological level of the machines used in these industries has reached our days, with a reasonable level of detail, through various technical treatises, such as De La Pirotechnia (Biringuccio, 1540) [10], Le Diverse Et Artificiose Machine Del Capitano Agostino Ramelli (Ramelli, 1588) [11] and De Re Metallica (Agricola, 1556) [12]. Existing originally as military engineering treatises, books on machinery began to cover almost every technical sector in the 15th and 16th centuries [13].
Specifically, the treatise De Re Metallica is one of the first works that deals in detail with the state of the art of mining and the separation and purification of metals [14]. It was written by Georgius Agricola (latinized name of Georg Bauer) who was a scholar and very well regarded academic and humanist, with many interests (science, technology, medicine, Latin grammar…) [15]. It consists of 12 books and has 294 figures, compiling the main techniques and mechanical devices used in the mining operations of that time. This work was used as a reference handbook for almost two centuries and became one of the main sources for the study of the technological solutions adopted by these industries [16]. In addition, it contains the first real description of industrial diseases of miners and the ways to reduce exposure to them [17]. Therefore, this treatise has always received the attention of scholars of science history, but also of engineers and doctors [18]. The great impact of this work is due its vast scope, precision and attention to detail (the hundreds of annotations are such a feature of the book) [19].
This treatise shows that the main sources of energy used to power mining machines were hydraulic and human energy. The use of hydraulic energy was restricted to operations near rivers. Hence, human energy was the most used, usually combined with elementary machines (levers, pulleys, winches and wedges), due to the limitations of accessibility to the mines [20].
One of the main problems in mining was the presence of water infiltrations that made difficult the regular course of underground operations [21]. Hence, the sixth book (one of the most important sections in the whole work) describes various systems for raising water with a high level of detail: chain of buckets, paternoster and piston pumps. Even a new machine for water drainage is described, in which the length of the pump body is independent from the depth to be drained [13]. Most of these systems required human intervention to operate.
Although the word "ergonomics" appears for the first time in the book An outline of Ergonomics, or the Science of Work based upon the truths drawn from the Science of Nature (Jastrzebowski, 1857) [22], in this Renaissance treatise a certain concern for the safety and health of the operators can be sensed, probably due to Agricola's medical knowledge [23]. The engravings included in this treatise reflect details not only of the machines used but also of the positions adopted by the operators to operate them. They reveal an advanced understanding (for the time in question) of the man-machine set, from a mechanical point of view (force, torque, stroke…) and the perspective of its ergonomics repercussions.
Hence, in this work, an ergonomics analysis of one of the human-powered machines collected in the sixth book of this treatise (a water extraction pump for mining operations) is carried out. In the illustrations of this book, several mechanical systems to drive the same machine can be observed. Current ergonomics analysis techniques have been used to compare these systems and quantify the improvements provided by each of them. The rapid upper limb assessment (RULA) and the rapid entire body assessment (REBA) methods have been applied to study the postural load, whereas the Check List OCRA (occupational repetitive action) method has been used to analyze the repetitive movements. It is intended to show that the mechanical evolution in these systems had an impact on an improvement in the ergonomic behavior of the task performed by the worker. Therefore, it would be an example of practical ergonomics applied to machine design (dating from the 16th century) that is ahead of its time.
A 3D virtualization has been carried out to simulate these mechanical systems, as well as the position of the operator operating them. This allows an analysis of industrial historical heritage through images of old engravings. Additionally, it shows examples of ergonomics in productive areas related to historical context, which may be a very interesting tool for teaching.
Finally, it is necessary to highlight that this work is aligned with the sustainable development goals number 3 (Good Health and Well-being), 4 (Quality Education) and 8 (Decent Work and Economic Growth).
2. Materials and Methods
Figure 1 shows three images from the sixth book of the De Re Metallica treatise (pp. 135–137) [24]. These images illustrate the operation of the same machine that is powered by three different systems. It is a pump for water extraction and drainage by means of a piston system, applied in mining operations typical of that time. All three systems provide the same result or benefit, from the point of view of the task to be performed. However, as previously mentioned, an evolution between the three systems can be observed, both at a mechanical level (dynamics and kinematics of the machine) and from the point of view of worker safety and health. In the first system (Figure 1a), the operator is placed on a wooden framework located above the drain. A pipe, made from a hollow trunk, descends to the bottom. The pipe has a series of perforations through which the water flows. The operator, standing on the boards, pulls the piston upwards raising the water. When the piston is pushed down, a valve is actuated and the water continues to be sucked upwards [25]. This is the simplest system. The energy that the operator applies to operate the pump is equal to the applied force, F 1, multiplied by the piston displacement h. The second system (Figure 1b) is identical to the first one as regards the hydraulic system (pipe, piston and valve) [25]. However, the mechanical drive is different. In this case, two transverse beams are used (one vertical and the other horizontal), in order to apply the leverage effect and obtain greater mechanical advantage. Therefore, the task is easier for the worker to carry out, but the mechanical system is more complex. The force applied, F 2, is lower than F 1, due to the leverage effect. Considering the piston displacement (h) constant, the energy saving in system 2 is proportional to F 2/F 1, that depends on the leverage geometry (D 2/d 2). This system also allows the operator to be moved away from the extraction area, making the activity more stable and safer. The third system (Figure 1c) is very similar to the second one but is more complex. In this case, two vertical posts with holes are erected in the upper part, in which a horizontal axis is fitted. Two wooden bars are fixed in the center of this axis. The piston is fixed at one end and a short piece of wood at the other. Therefore, it can pass between the two posts and move back and forth. When the operator pulls this piece of wood, the piston is inserted into the pipe; the piston moves outwards when returns by its own weight [25]. In this case, not only the mechanical advantage provided by the lever effect is used, but also the machine inertia. As in the second system, the energy saving with respect to system 1 is proportional to F 3/F 1, which depends on (D 3/d 3). The main advantage over system 2 is that the force is applied in the horizontal direction and, therefore, the operator's posture is less forced. In addition, it also provides a more stable structure away from the extraction zone, compared to the first system.
Besides the differences from the purely mechanical or safety point of view, the positions of the operators and the way they exert force show morphological dissimilarities. Two current postural load assessment methods have been used to perform an analysis of these differences: the rapid upper limb assessment (RULA) and the rapid entire body assessment (REBA) methods.
These methods have been chosen because they are designed to analyze possible musculoskeletal disorder (MSDs) risks in a wide variety of activities. In addition, as their names suggest, they are quick and easy to apply [26]. They are based on the observation of the carried-out activity, so they require minimal resources from the point of view of the equipment to be used [27]. The application of these methods results in an indicator or score that makes possible to determine whether it is necessary to carry out any corrective action on the task, as well as the urgency of the action [28].
Obviously, the postures under study in this work are impossible to observe on-site. Therefore, the images in Figure 1 have been taken as reference. Since they are static images, they may not reflect the most unfavorable case. To facilitate a more dynamic analysis, as well as the measurement of angles between the different joints, 3D CAD models have been developed for the three drive systems (Figure 2) using the software SolidWorks 2019. The human model has been developed according to the standards ISO 7250-1:2017 (description of anthropometric measurements for the creation of anthropometric databases) [29] and ISO 15536-1:2005 (general requirements for the design and development of computer manikins, body templates and manikin systems) [30].
The RULA method was developed to evaluate the exposure of individual workers to ergonomics risk factors associated with upper extremity, considering biomechanical and postural load requirements of job tasks on several body parts [31]. The scoring system considers the muscle activity due to static and dynamic postures. This method divides the assessed body parts in two groups, A and B, in order to evaluate the static behavior. The group A includes the upper arms, lower arms and wrists (Figure 3), whereas the group B includes the neck, trunk and legs (Figure 4) [32]. The applied load/force intensity level and the frequency of the tasks are used to evaluate the dynamic activity. These data allow compiling the risk factor variables, generating a single score that represents the level of MSDs risk (from 1 to 7). Hence, the level of action is classified into 4 groups, ranging from 1 (acceptable risk) to 4 (urgent changes are required) [33].
The REBA method is very similar to the previous one but gives greater relevance to the lower extremities. The scoring system also considers the static and dynamic postures. To evaluate the static activity, it divides the body in two groups, A and B. The group A includes the neck, trunk and legs assessment (Figure 5). The effect of the load/force handled by the worker is added to this group. The group B considers the upper and lower arms and the wrists postures (Figure 6), as well as the type of grip. The frequency of movements, the stability and sudden postural changes are used to evaluate the dynamic activity. The final score can vary between 1 and 15 points, giving rise to a classification of the level of action on 5 sections, ranging from level 0 (unappreciable risk; intervention is not necessary) to 4 (very high risk, urgent need of action and modifications in the workplace) [34].
For the application of these methods, the most unfavorable posture (or set of them) must be selected, considering the duration, frequency and deviation from a neutral position. Most measurements are based on the determination of angular deviations between the different joints of the body [33]. The measurement process can be carried out using any instrument that allows angular measurement (a simple angle conveyor may be sufficient). The measurement process is usually performed in the workplace but using photographs of the operator adopting the working position is sometimes enough [35]. Due to the impossibility of in situ observation of the analyzed tasks, the 3D CAD models exposed in Figure 2 have been used to obtain these measurements.
To know the anthropometric data of the operator with a reasonable approximation is another aspect to consider when applying these methods. The interest in knowing the measurements and proportions of the human body is very old. Polykleitos, in the fifth century, formulated a treaty of proportions, from which Vitruvius developed the Roman canon that divided the body into eight heads [36]. At the end of the 15th century, Leonardo da Vinci captured the classical principles of human proportions from the texts of Marcus Vitruvius in a drawing in which the figure of a man circumscribed within a square and a circle is observed (a.k.a., the "Vitruvian man" or "Canon of human proportions"). Figure 7a shows some of these proportions regarding the total height, h 1 [37]. Although these proportions would be the ideal from the Aristotelian point of view, they usually do not coincide with the real man proportions [38].
Steckel, R., in the work New Light on the "Dark Ages": The Remarkably Tall Stature of Northern European Men during the Medieval Era, states that average heights fell from 173.4 cm in the early Middle Ages to a low of roughly 167 cm during the 17th and 18th centuries, based on a sample of skeletons from northern Europe [39]. Unfortunately, further studies on the human body proportions of that time have not been found in the literature. The value of 171.9 cm has been considered reasonable as reference height for this work, in order to use data as realistic as possible. This value coincides with the percentile 50 (P50) of the human height, for the current European population [40]. Hence, starting from this value (body height), the rest of the anthropometric values have been obtained for that percentile, P50.
Figure 7b shows the main human anthropometric variables considered in this work. Their values are listed in the Table 1 (P50). In addition, Table 1 also lists the values of the considered anthropometric parts, which have been calculated from the proportions indicated by da Vinci (for h 1 = 171.9 cm). These values are close to the current values used for height anthropometric measurements. However, the proportions collected by da Vinci underestimate the current data for the upper limbs.
Once the human anthropometric values have been selected, the dimensions of the three mechanical systems have been set proportionally by observing the Figure 1. The main mechanical dimensions are shown in Figure 8. The selected postures correspond to the most unfavorable cases for every system (lower piston stroke end for systems 1 and 3; upper piston stroke end for system 2). For all cases, the piston stroke has been set at 300 mm. Since the RULA and REBA methods must be applied to the right and left body side separately, a situation of symmetry has been taken on both sides for all the configurations to be analyzed in this work.
The RULA and REBA methods allow performance of a postural analysis and consider, to a certain extent, the level of activity developed. However, other factors that can be relevant in the activity development are not considered: pauses or brief interruptions during the work cycle, complementary risk factors (use of protection elements during gripping, use of vibrant tools or that cause compressions on the skin…), work rhythms, etc.
In order to incorporate this type of analysis to the systems under study, the Check List OCRA (occupational repetitive action) method has been selected. This method considers the complete work cycle, including periods of activity, recovery and breaks [41]. It also incorporates a postural analysis, focused mainly on the upper limbs, although in a less exhaustive way than the RULA and REBA methods. In addition, it considers the complementary risk factors mentioned previously [42]. Like the RULA and REBA methodology, it is an easy and fast tool, which is based on the observation of the tasks performed by the operator throughout the working day and the activity cycles.
As mentioned above, the impossibility of observing the tasks under analysis was the main difficulty of applying these methods to the specific case studied. The only references were provided by the images in Figure 1. Notwithstanding, the following hypotheses, which may be within what is possible, were assumed: a work shift duration of 8 h, equivalent to a total of 8 work cycles (carrying out a complete work cycle every hour); a dedication to non-repetitive work of 10 min per cycle; a recovery time of 20 min per cycle; lunch time of 1 h. The global values for the entire work shift are listed in the Table 2. It is necessary to point out that these starting hypotheses are conservative, closer to current work shift, but they can serve as a first starting point in this work. Probably, the working conditions at that time were more severe. Specifically, mining was considered an exhausting work with horrific working conditions, even by Renaissance standards, with many hours spent in heat, dust, semidarkness and with inadequate oxygen. Unlike agricultural endeavors, mining could continue night and day and had no off-season [43].
To determine the risk level, this method assesses various risk factors, independently, to later weight them based on their frequency or repetition throughout the work shift (Table 3).
These factors are used to obtain the Check List OCRA index (ICKL) through the application of the Equation (1). The ICKL value allows classifying the level of risk due to repetitive load in six groups, between "optimal" (ICKL ≤ 7.5) and "unacceptably high" (ICKL ≥ 22.5), as well as the recommended action, between "not required" and "recommended job improvement, medical supervision and training" [44].
ICKL = (RT + AF + FF + AP + AR) × DE
3. Results and Discussion
3.1. RULA
Table 4 and Table 5 show the assessment results for the groups A and B, respectively. In addition, Figure 9 collects the global score for each group.
With regard to the group A assessment, the main differences between the three systems were focused on the lower arms and wrists. System 1 obtained a better score in lower arm posture than systems 2 and 3. However, the results regarding the wrist flexion and twisting were poorer. As a result, system 1 obtained the worst score in the group A assessment. Although system 3 showed a better score in the evaluation of wrist posture than system 2, this fact was not reflected in a better final score and both systems obtained the same result.
Regarding the group B, system 1 showed the worst score, mainly due to a more strained neck and trunk posture than in systems 2 and 3. System 3 obtained a better result in the neck posture than system 2, but the RULA method was not sensitive to this difference and the group B assessment final score was the same for both systems.
Once static postures were analyzed, the dynamic component (activity level and load/force exerted by the worker) were assessed. Table 6 shows the assessment and score for the dynamic component. Regarding the activity, no differences were found between the three systems. Nevertheless, the load/force component obtained a better result in systems 2 and 3. This is due to the mechanical advantage provided by the lever mechanism, which results in less effort from the operator to exert the same force.
The static and dynamic components were combined to obtain the score for the RULA assessment method. Table 7 shows the RULA score, the risk level and the proposed actions resulting from the assessment. Figure 10 collects a summary of the score obtained in the assessment of every system.
System 1 obtained the worst results, with a score of 7 (the maximum score allowed by the method). The main causes were the worse result in both groups A (mainly due to the wrist posture) and B (mainly due to the neck and trunk posture), as well as in the application of the load/force (no mechanical advantage). The risk level stood at the maximum value, 4. Therefore, a fast action is required and changes in workplace design are needed.
Systems 2 and 3 obtained the same RULA score, 6 points. Despite the better results in groups A, B and load/force level with respect to system 1, the global result of the assessment was also quite poor. The risk level was 3 and, therefore, changes in the workplace design are required soon. Hence, the RULA method has shown little sensitivity to the improvements provided by systems 2 and 3 relative to system 1. In addition, the improvements provided by system 3 versus 2 have not been reflected in an improvement in the results either. This may be because the method mainly focuses on upper limb postures, giving less importance to other issues [45]. Despite the low sensitivity of the method, certain ergonomics improvements in the workplace have been observed in a parallel way to the evolution of the pump drive system.
3.2. REBA
Table 8 lists the assessment results of the postures collected within the group A (neck, trunk and legs), as well as the applied load level, for each of the three drive systems analyzed. Similarly, Table 9 shows the assessment sheet for the group B (upper arms, lower arms and wrists) and the coupling. A summary of the scores is shown in Figure 11.
With regard to the group A, system 1 has shown the worst results, mainly due to a worse neck and trunk posture. The location of the operator, just above the water extraction sump, and the mechanical system adopted make the posture much more forced, giving rise to a greater flexion of the back and neck.
On the other hand, the use of mechanical lever systems provides an additional mechanical advantage in systems 2 and 3 that facilitates the work of the operator, reducing the level of load to be applied. Although in system 3 the inertia due to the drive system is used, this inertia is only favored in the cycle of movement of the piston upwards, while it is necessary to overcome it in the opposite direction. System 3 has a certain advantage over 2 regarding the position of the trunk, being fully upright.
Additionally, the change in the mechanical configuration of the lever means that the applied effort is mainly horizontal, whereas it is vertical in systems 1 and 2. No significant differences have been found in the position of the legs (bilateral support in all cases). Nevertheless, it is necessary to point out that neither the REBA nor the RULA method consider the additional risk due to the location of the operator on the water extraction area, in an unstable position on a wooden framework. For systems 2 and 3, the drive system allows the operator to move away from the extraction area, making the task more stable and safer.
Regarding the group B, the results are not as clear as in the group A. System 1 has shown betters results for the lower arms posture than systems 2 and 3, as well as for the upper arms compared to system 3. However, the wrists posture was more favorable for systems 2 and 3 than for system 1. In addition, system 2 has shown a certain advantage over system 3, due to less flexion of the upper arm. Finally, all systems have shown good grip level.
Table 10 shows the activity assessment for every pump system. The three systems have obtained the same score, because the frequency of the movements is similar and there are no sudden posture changes. Table 11 shows the REBA score, the risk level and the proposed actions resulting from the assessment. Figure 12 summarizes the score obtained in the assessment of every system.
System 1 is the worst one, with the highest final score (8 points). The resulting risk level was "high" and a quick intervention on the workplace is recommended. This is caused by a worse score in both groups A and B. The worse neck and trunk postures, together with the application of a greater load, results in the highest group A score (6 points). In the group B, the differences with systems 2 and 3 were lower. However, the good results in the upper and lower arms posture were not enough to compensate a worse score in the writs posture. In the combination of the A and B scores, the weight of the group A (trunk, neck, legs and load) was higher than the group B (arms, wrists and coupling).
System 2 obtained a much better score than system 1 (4 points), being the resulting risk level "Medium" and a modification of the workplace is needed, but not urgently. The worst trunk posture makes system 2 to obtain a worse score in the group A than the system 3. In addition, the better upper arm score was not enough to obtain a better result than the system 3 in the group B.
Therefore, system 3 has been the best rated (3 points). The obtained risk level was "low", and a future intervention may be necessary.
The differences found in the assessment results have been greater than in the application of the RULA method. A more clearly improvement in the ergonomics performance, together with the evolution in the mechanical drive system, has been observed. Hence, the REBA method has shown greater sensitivity to the postural changes between the analyzed systems than the RULA method. This fact may be explained considering that that the RULA method is mainly focused on the upper limbs, whereas the REBA method gives more weight on other elements such as the neck or trunk posture, in which greater differences have been found between the three systems [46,47].
3.3. Check List OCRA
Table 12 shows the score of the three systems for each risk factor, after applying the Check List OCRA method. Figure 13 summarizes the obtained results.
System 1 obtained the highest score (26 points, purple level and high risk) whereas the score for systems 2 and 3 was lower (15.6 points, red level and medium risk).
The main differences were focused on the FF risk index. System 1 has obtained a worse result in the FF (24 points) mainly because the working activity requires a more intense force than systems 2 and 3. The use of a different drive system allows using the mechanical advantage (leverage) to systems 2 and 3, which obtained a score of 8 points. With regard to the AP risk index, no significant differences have been found between the three systems. Despite system 1 having a worse result in the wrist posture assessment, the AP score was the same for the three systems. This is because this method takes into account only the most unfavorable body part score, which is finally added to the stereotype. Hence, this method is not able to detect the postural improvements of systems 2 and 3, mainly in the neck (not assessed), trunk (not assessed) and wrist posture, with respect to system 1. The postural improvement in the trunk of system 3 compared to system 2 is not reflected in differences in scores between them. Additionally, the assessment of new factors, such as RT, AF, AR or DE, has not led to significant differences between systems 1, 2 and 3.
Therefore, this method allows the analysis of additional factors not included in the RULA and REBA methods (recovery time, additional risk…) but is less sensitive to the postural improvements provided by the different mechanical systems analyzed. However, as in the REBA and RULA methods, a certain ergonomics evolution is observed parallel to the evolution of the pump drive system.
Finally, it is necessary to point out that the starting hypotheses used to apply this method are more in line with an activity level based on current labor legislation. These hypotheses are, therefore, quite conservative. Probably, the number of hours of the shift would be much higher in the 16th century. If a method with similar characteristics had been applied at that time, a greater number of risk levels or a redistribution of the rating scale would have been necessary, considering the existence of harder tasks than those analyzed. In that case, the results would possibly have been a medium risk level rather than an extreme one.
4. Conclusions
In the present work, current ergonomics assessment techniques were used to analyze the musculoskeletal disorders risks of a mechanical device (a water pump used in mining, driven by three different systems) collected in the Renaissance treatise De Re Metallica. The RULA and REBA methods were used to carry out the postural analysis, while the OCRA Check List method was used for the repetitive action analysis. It is intended to show that there was a certain concern for ergonomics in the Renaissance, long before the appearance of this concept for the first time. This is the main novelty of this work. The 3D virtualization of these mechanical systems has allowed an analysis of industrial historical heritage through images of old engravings. This is also very interesting from a teaching point of view, since this work allows students to be shown ergonomics examples in productive areas related to historical context.
Regarding the postural assessment, both RULA and REBA methods have shown ergonomics improvements in the workplace in a parallel way to the evolution of the pump drive system. System 1 was the most unfavorable, showing the highest risk level. Systems 2 and 3 showed a better behavior, mainly due to a better wrist, trunk and neck posture, as well as the mechanical advantage provided by the use of a lever system. However, the RULA method showed lower sensitivity than the REBA method to the postural improvements observed between the three systems. This may be because the method mainly focuses on upper limb postures, giving less importance to other issues, such as the neck or trunk posture, in which greater differences have been found.
Regarding the repetitive action analysis, the Check List OCRA method also showed ergonomics improvements between the systems. System 1 showed the worst results (high risk), due to a higher score in the FF (use of force) risk factor. The results for systems 2 and 3 were better (medium risk) due to the use of the lever mechanical advantage. However, this method was not able to detect the postural improvements of systems 2 and 3 (neck, trunk and wrist) with respect to system 1. The postural improvement in the trunk of system 3 compared to system 2 was neither reflected in differences in scores between them. Therefore, this method allowed the analysis of additional factors, not included in the RULA and REBA methods (recovery time, additional risk…), but was less sensitive to the postural improvements provided by the different mechanical systems analyzed.
Therefore, a postural improvement has been observed from system 1 (the worst one) to system 3 (the best one). Parallel, there is an energy saving of systems 2 and 3 with respect to system 1, which is proportional to the reduction of the applied force (due to the lever effect). This reduction depends on the lever arm geometry. The ergonomics behavior can be improved modifying this geometry. Notwithstanding, the mechanical and morphological complexity increases from system 1 to 3. It is necessary to point out that more mechanical and ergonomics improvements are possible in these systems. In fact, the treatise De Re Metallica collects other extraction systems, based on a chain of buckets and pater noster systems, the analysis of which is left for further works.
Although the application of these methods requires a real observation of the activity, the detail level of the figures collected in De Re Metallica allows, in a reasonable way, to point to a parallel evolution of the machine and the worker health and safety. Agricola was concerned with analyzing (for the same machine) which drive system allowed a better operator-machine coupling to achieve, on the one hand, a higher work performance and, on the other, more favorable working conditions. It is, therefore, an example of practical and real ergonomics applied to machine design dating from the 16th century, a time long before the appearance (for the first time) of the concept of ergonomics.
Finally, it is necessary to highlight that this research is aligned with the sustainable development goals number 3 (Good Health and Well-being), 4 (Quality Education) and 8 (Decent Work and Economic Growth).
Author Contributions
Conceptualization, F.J.T., L.S., J.C. and M.A.S.; methodology, F.J.T., L.S., J.C. and M.A.S.; validation, F.J.T.; data curation, F.J.T.; formal analysis, F.J.T., L.S., J.C. and M.A.S.; writing—original draft preparation, F.J.T.; writing—review and editing, L.S., J.C. and M.A.S.; All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
The authors thank the Universidad de Málaga-Campus de Excelencia Internacional Andalucía Tech and the Universidad Nacional de Educación a Distancia (UNED) for their contribution to this work, carried out within a study grant from the Manufacturing Engineering Society for the Master in Analysis, Management and Projects in Industrial Heritage (UNED).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lynch, M. Mining in World History; Globalities Series; Reaktion Books: London, UK, 2003; ISBN 9781861891730. [Google Scholar]
- Pardo Abad, C.J. The post-industrial landscapes of Riotinto and Almadén, Spain: Scenic value, heritage and sustainable tourism. J. Herit. Tour. 2017, 12, 331–346. [Google Scholar] [CrossRef]
- Martín-Béjar, S.; Claver, J.; Sebastián, M.A.; Sevilla, L. Graphic Applications of Unmanned Aerial Vehicles (UAVs) in the Study of Industrial Heritage Assets. Appl. Sci. 2020, 10, 8821. [Google Scholar] [CrossRef]
- Claver, J.; García-Domínguez, A.; Sevilla, L.; Sebastián, M.A. A multi-criteria cataloging of the immovable items of industrial heritage of Andalusia. Appl. Sci. 2019, 9, 275. [Google Scholar] [CrossRef]
- Douet, J. Industrial Heritage Re-Tooled: The TICCIH Guide to Industrial Heritage Conservation; Routledge, Taylor & Francis Group: London, UK, 2015; ISBN 9781315426525. [Google Scholar]
- Claver, J.; García-Domínguez, A.; Sebastián, M.A. Multicriteria decision tool for sustainable reuse of industrial heritage into its urban and social environment. Case studies. Sustainability 2020, 12, 7430. [Google Scholar] [CrossRef]
- Claver, J.; García-Domínguez, A.; Sebastián, M.A. Decision-Making Methodologies for Reuse of Industrial Assets. Complexity 2018, 2018, 4070496. [Google Scholar] [CrossRef]
- Pardo Abad, C.J. Valuation of Industrial Heritage in Terms of Sustainability: Some Cases of Tourist Reference in Spain. Sustainability 2020, 12, 9216. [Google Scholar] [CrossRef]
- De Gregorio, S.; De Vita, M.; De Berardinis, P.; Palmero, L.; Risdonne, A. Designing the Sustainable Adaptive Reuse of Industrial Heritage to Enhance the Local Context. Sustainability 2020, 12, 9059. [Google Scholar] [CrossRef]
- Biringuccio, V. De La Pirotechnia; Translated from the Italian, with an Introduction and Notes by Cyril Stanley Smith & Martha Teach GnudiSeeley; W. Mudd Series; American Institute of Mining and Metallurgical Engineers: New York, NY, USA, 1942. [Google Scholar]
- Ramelli, A. Le Diverse et Artificiose Machine del Capitano Agostino Ramelli; dal Ponte Della Tresia, Ingegniero del Christianissimo re di Francia et di Dollonia: Nellequali Si Contengono Uarij et Industriosi Mouimenti, Degni Digrandißima Speculatione, Per Cauarne Bene; In Casa Del'autore: Paris, France, 1588. [Google Scholar]
- Agricola, G. De Re Metallica; Translated from the First Latin Edition of 1556 by Herbert Clark Hoover and Lou Henry Hoover; Dover Publications Inc.: New York, NY, USA, 1950. [Google Scholar]
- Macini, P.; Mesini, E. Hydraulic Pumps of Agricola's De Re Metallica (1556). J. Hydraul. Eng. 2004, 130, 1051–1054. [Google Scholar] [CrossRef]
- Bork, R.O. De Re Metallica: The Uses of Metal in the Middle Ages; AVISTA Studies in the History of Medieval Technology, Science and Art; Routledge, Taylor & Francis Group: London, UK, 2005; Volume 4, ISBN 0754650480. [Google Scholar]
- Barton, I.F. Georgius Agricola's De Re Metallica in early modern scholarship. Earth Sci. Hist. 2016, 35, 265–282. [Google Scholar] [CrossRef]
- Burns, D.T. Swiss contributions to chemistry: Five hundred years of progress, from alchemy to a modern science. Anal. Chim. Acta 1999, 393, 3–10. [Google Scholar] [CrossRef]
- Ars, C.; Gauthier, J.; Florsch, N. Underground ancient mine work ventilation modeling. J. Archaeol. Sci. Rep. 2021, 37, 102805. [Google Scholar] [CrossRef]
- Langård, S. Georgius Agricola, a Pioneer in the Toxic Hazards of Mining, and His Influence. In Toxicology in the Middle Ages and Renaissance; Elsevier Inc.: Amsterdam, The Netherlands, 2017; pp. 83–90. ISBN 9780128095591. [Google Scholar]
- Craddock, P.T. Agricola, De Re Metallica: A landmark in the history of metallurgy. Endeavour 1994, 18, 67–73. [Google Scholar] [CrossRef]
- Beamud, E.M.; Claver, J.; Sebastián, M.A. Typological analysis of machines used in mining considered in technical treatises of the Renaissance. In Proceedings of the XVII International Congress on Geological and Mining Heritage, Almadén, Spain, 21–24 September 2017. [Google Scholar]
- Barton, I.F. Georgius Agricola's contributions to hydrology. J. Hydrol. 2015, 523, 839–849. [Google Scholar] [CrossRef]
- Jastrzebowski, W. An Outline of Ergonomics, or the Science of Work Based upon the Truths Drawn from the Science of Nature. In International Encyclopedia of Ergonomics and Human Factors, 2nd ed.; CRC Press, Taylor and Francis Group: Boca Raton, FL, USA, 2006; Volume 3. [Google Scholar]
- Winkelstein, W. De Re Metallica ("On the Nature of Metals"). Epidemiology 2011, 22, 127. [Google Scholar] [CrossRef] [PubMed]
- Agricolae, G. De Re Metallica Libri XII; Froben, J., Ed.; Froben: Basel, Switzerland, 1561. [Google Scholar]
- The Project Gutenberg eBook of De Re Metallica, by Georgius Agricola. Available online: https://www.gutenberg.org/files/38015/38015-h/38015-h.htm (accessed on 4 July 2021).
- Kee, D. Comparison of OWAS, RULA and REBA for assessing potential work-related musculoskeletal disorders. Int. J. Ind. Ergon. 2021, 83, 103140. [Google Scholar] [CrossRef]
- Diego-Mas, J.A.; Poveda-Bautista, R.; Garzon-Leal, D.C. Influences on the use of observational methods by practitioners when identifying risk factors in physical work. Ergonomics 2015, 58, 1660–1670. [Google Scholar] [CrossRef]
- Cremasco, M.M.; Giustetto, A.; Caffaro, F.; Colantoni, A.; Cavallo, E.; Grigolato, S. Risk assessment for musculoskeletal disorders in forestry: A comparison between RULA and REBA in the manual feeding of a wood-chipper. Int. J. Environ. Res. Public Health 2019, 16, 793. [Google Scholar] [CrossRef] [PubMed]
- ISO 7250-1:2017—Basic Human Body Measurements for Technological Design—Part 1: Body Measurement Definitions and Landmarks; International Organization for Standardization: Geneva, Switzerland, 2017.
- ISO 15536-1:2005—Ergonomics—Computer Manikins and Body Templates—Part 1: General Requirements; International Organization for Standardization: Geneva, Switzerland, 2005.
- McAtamney, L.; Nigel Corlett, E. RULA: A survey method for the investigation of work-related upper limb disorders. Appl. Ergon. 1993, 24, 91–99. [Google Scholar] [CrossRef]
- Huang, C.; Kim, W.; Zhang, Y.; Xiong, S. Development and validation of a wearable inertial sensors-based automated system for assessing work-related musculoskeletal disorders in the workspace. Int. J. Environ. Res. Public Health 2020, 17, 6050. [Google Scholar] [CrossRef] [PubMed]
- Gómez-Galán, M.; Callejón-Ferre, Á.J.; Pérez-Alonso, J.; Díaz-Pérez, M.; Carrillo-Castrillo, J.A. Musculoskeletal risks: RULA bibliometric review. Int. J. Environ. Res. Public Health 2020, 17, 4354. [Google Scholar] [CrossRef]
- Hignett, S.; McAtamney, L. Rapid Entire Body Assessment (REBA). Appl. Ergon. 2000, 31, 201–205. [Google Scholar] [CrossRef]
- Diego-Mas, J.A.; Ergonautas, Universidad Politécnica de Valencia. Postural Evaluation Using the REBA Method. 2015. Available online: https://www.ergonautas.upv.es/metodos/reba/reba-ayuda.php (accessed on 4 July 2021).
- Cesariano, C. Di Lucio Vitruvio Pollione de Architectura: Libri Dece; Gottardo da Ponte: Como, Italy, 1521. [Google Scholar]
- Nicholson, P.J. Art and occupation: Leonardo da Vinci, the proportions of the human figure (after vitruvius), c 1490. Occup. Med. 2019, 69, 86–88. [Google Scholar] [CrossRef]
- Thomas, D.M.; Galbreath, D.; Boucher, M.; Watts, K. Revisiting Leonardo da Vinci's Vitruvian Man Using Contemporary Measurements. JAMA—J. Am. Med. Assoc. 2020, 323, 2342–2343. [Google Scholar] [CrossRef]
- Steckel, R. New Light on the "Dark Ages": The Remarkably Tall Stature of Northern European Men during the Medieval Era. Soc. Sci. Hist. 2004, 28, 211–229. [Google Scholar] [CrossRef]
- Jürgens, H.W.; Matzdorff, I.; Windberg, J. International Anthropometric Data for Workplace and Machinery Design; Federal Institute for Occupational Safety and Health: Dortmund, Germany, 1998.
- Taborri, J.; Bordignon, M.; Marcolin, F.; Bertoz, A.; Donati, M.; Rossi, S. On the OCRA measurement: Automatic computation of the dynamic technical action frequency factor. Sensors 2020, 20, 1643. [Google Scholar] [CrossRef] [PubMed]
- Tirloni, A.S.; Dos Reis, D.C.; Tirloni, S.F.; Moro, A.R.P. Exertion perception when performing cutting tasks in poultry slaughterhouses: Risk assessment of developing musculoskeletal disorders. Int. J. Environ. Res. Public Health 2020, 17, 9534. [Google Scholar] [CrossRef]
- Sider, S. Handbook to Life in Renaissance Europe; Oxford University Press: Oxford, UK, 2007; ISBN 0195330838. [Google Scholar]
- Colombini, D.; Occhipinti, E. Risk Analysis and Management of Repetitive Actions: A Guide for Applying the OCRA System (Occupational Repetitive Actions), 3rd ed.; Ergonomics Design, Mgmt. Theory & Applications; CRC Press: Boca Raton, FL, USA, 2016; ISBN 9781498736633. [Google Scholar]
- Hita-Gutiérrez, M.; Gómez-Galán, M.; Díaz-Pérez, M.; Callejón-Ferre, Á.J. An overview of REBA method applications in the world. Int. J. Environ. Res. Public Health 2020, 17, 2635. [Google Scholar] [CrossRef]
- Choi, K.H.; Kim, D.M.; Cho, M.U.; Park, C.W.; Kim, S.Y.; Kim, M.J.; Kong, Y.K. Application of aula risk assessment tool by comparison with other ergonomic risk assessment tools. Int. J. Environ. Res. Public Health 2020, 17, 6479. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhang, R.; Lee, C.H.; Lee, Y.C. An evaluation of posture recognition based on intelligent rapid entire body assessment system for determining musculoskeletal disorders. Sensors 2020, 20, 4414. [Google Scholar] [CrossRef] [PubMed]
Figure 1. Detail of the illustrations on pages 135 (a), 136 (b) and 137 (c) of Book VI of De Re Metallica by Georgius Agricola, adapted by the authors from [24].
Figure 1. Detail of the illustrations on pages 135 (a), 136 (b) and 137 (c) of Book VI of De Re Metallica by Georgius Agricola, adapted by the authors from [24].
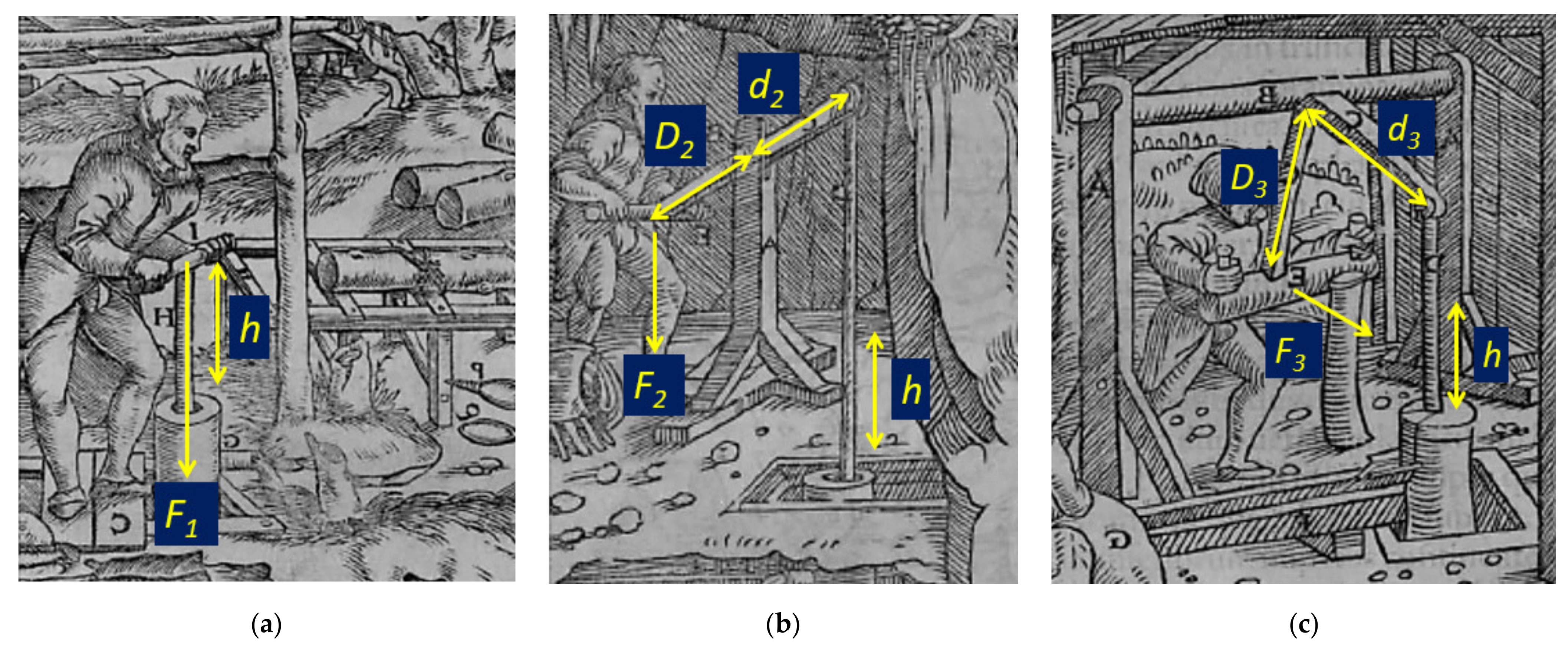
Figure 2. 3D CAD models for the different drive systems: Systems (a) 1, (b) 2 and (c) 3.
Figure 2. 3D CAD models for the different drive systems: Systems (a) 1, (b) 2 and (c) 3.
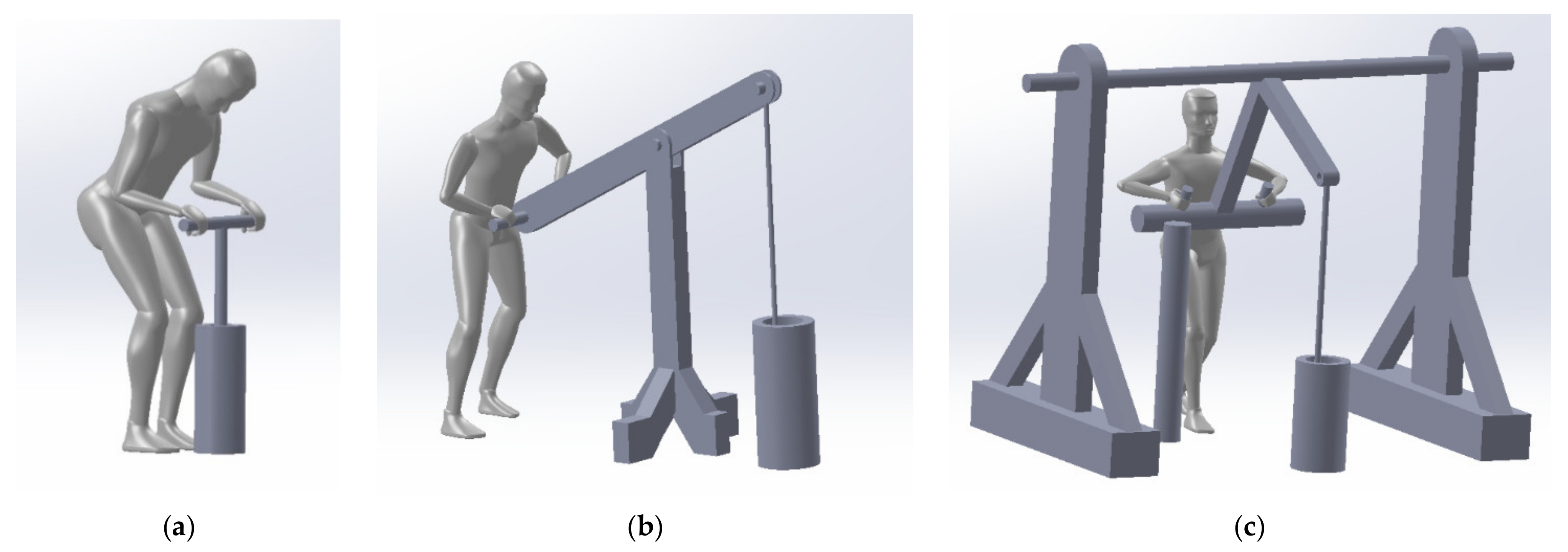
Figure 3. Group A body part diagrams (RULA method): (a) Upper arms flexion-extension; (b) Raised shoulder, abducted arm or leaning/supporting the weight; (c) Lower arms flexion; (d) Work across the midline or out to side of body; (e) Wrist flexion; (f) Radial or ulnar deviation; (g) Wrist twisting.
Figure 3. Group A body part diagrams (RULA method): (a) Upper arms flexion-extension; (b) Raised shoulder, abducted arm or leaning/supporting the weight; (c) Lower arms flexion; (d) Work across the midline or out to side of body; (e) Wrist flexion; (f) Radial or ulnar deviation; (g) Wrist twisting.
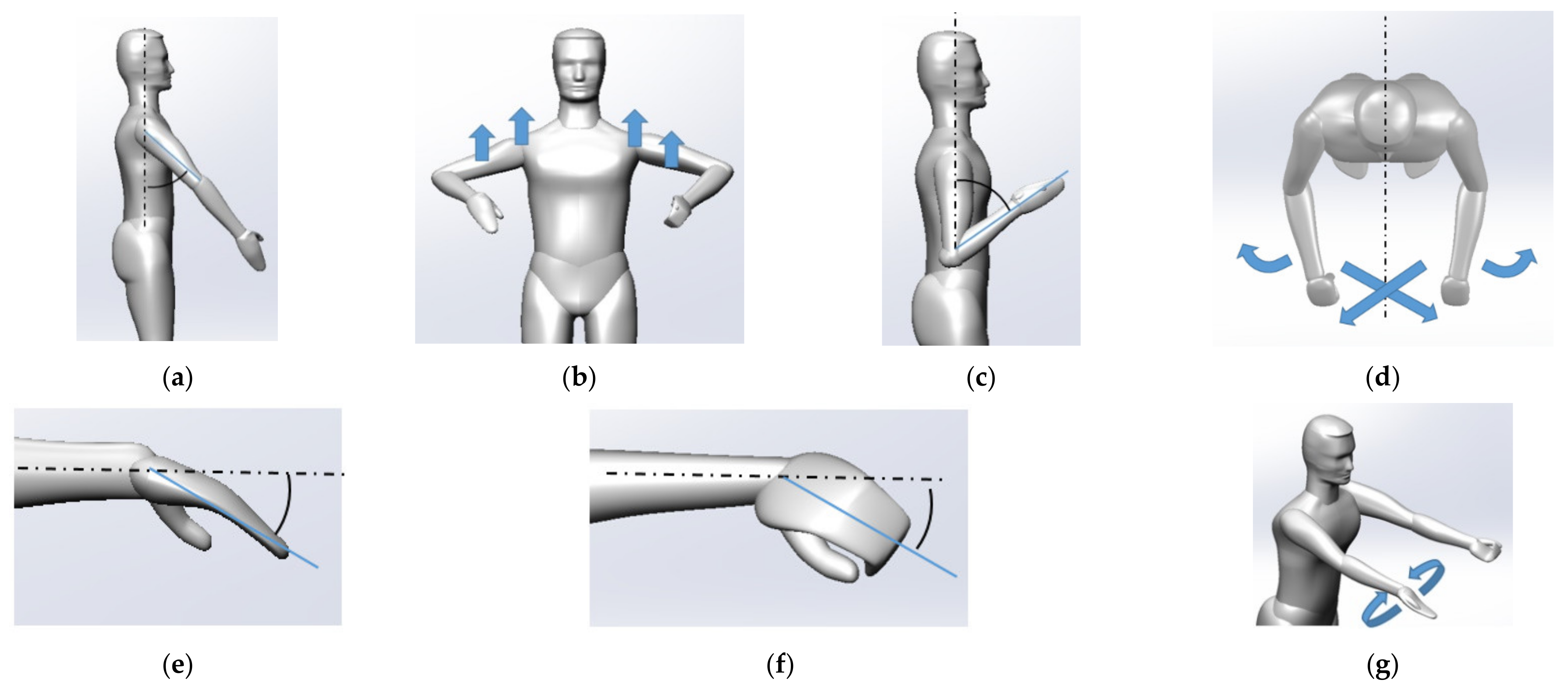
Figure 4. Group B body part diagrams (RULA method): (a) Neck flexion-extension; (b) Neck twisting or side flexed; (c) Trunk flexion; (d) Trunk twisting or side flexed; (e) Legs position.
Figure 4. Group B body part diagrams (RULA method): (a) Neck flexion-extension; (b) Neck twisting or side flexed; (c) Trunk flexion; (d) Trunk twisting or side flexed; (e) Legs position.
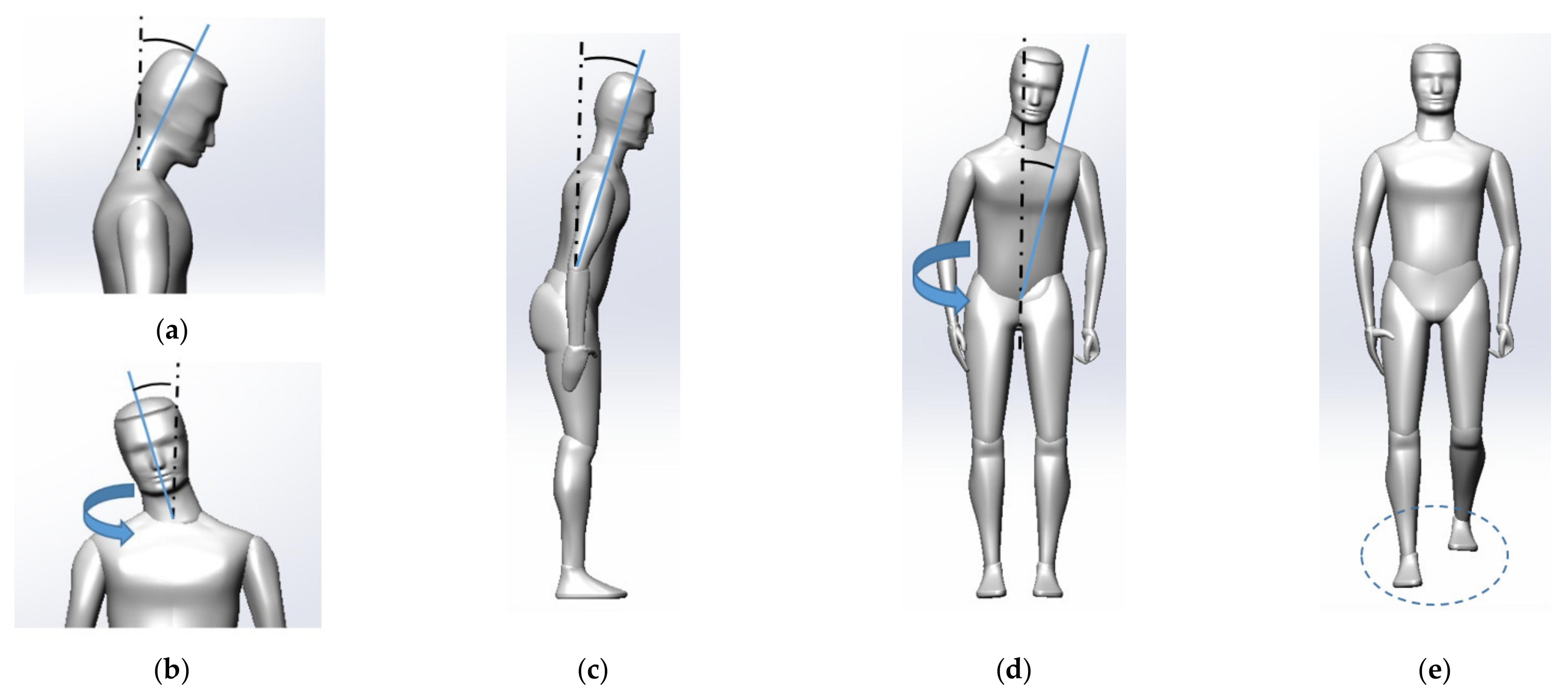
Figure 5. Group A body part diagrams (REBA method): (a) Trunk flexion-extension; (b) Trunk twisting or side flexed; (c) Neck flexion-extension; (d) Neck twisting or side flexed; (e) Legs position; (f) Knees flexion.
Figure 5. Group A body part diagrams (REBA method): (a) Trunk flexion-extension; (b) Trunk twisting or side flexed; (c) Neck flexion-extension; (d) Neck twisting or side flexed; (e) Legs position; (f) Knees flexion.

Figure 6. Group B body part diagrams (REBA method): (a) Upper arms flexion-extension; (b) Arm abducted or rotated, raised shoulder, gravity assisted posture; (c) Lower arms flexion; (d) Wrists flexion-extension; (e) Wrists deviation; (f) Wrists twisting.
Figure 6. Group B body part diagrams (REBA method): (a) Upper arms flexion-extension; (b) Arm abducted or rotated, raised shoulder, gravity assisted posture; (c) Lower arms flexion; (d) Wrists flexion-extension; (e) Wrists deviation; (f) Wrists twisting.
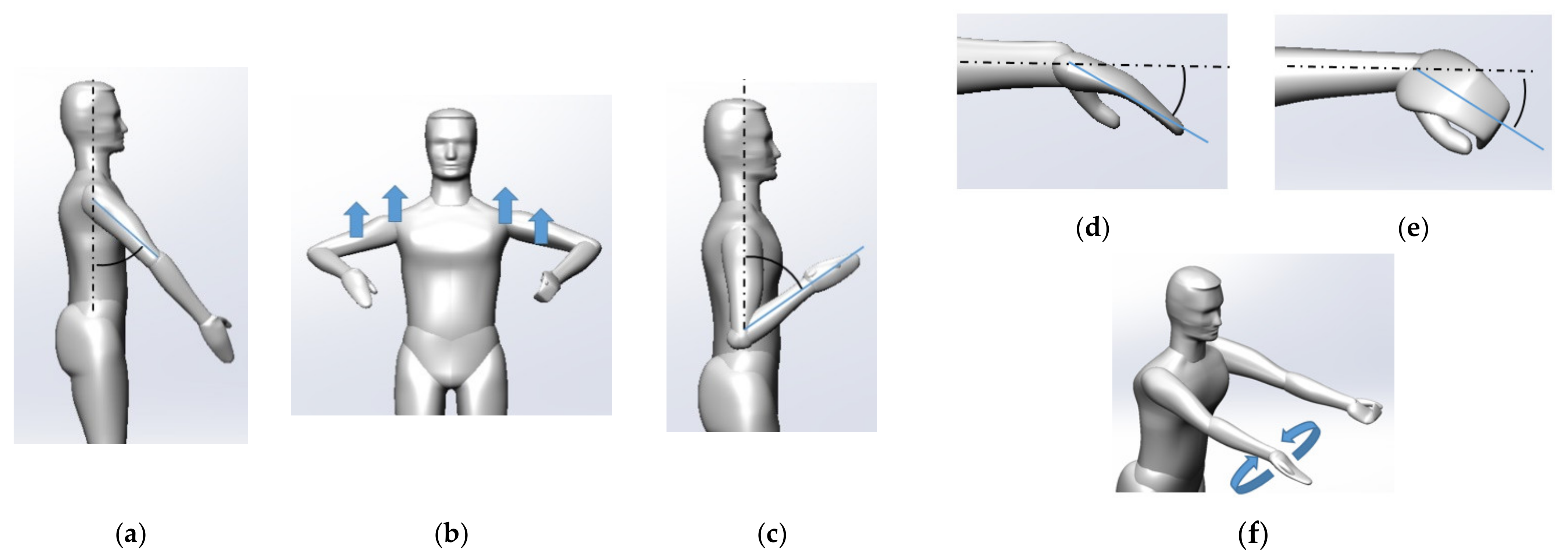
Figure 7. (a) Authors' drawing based on Leonardo da Vinci's "Vitruvian man", indicating proportions of body dimensions to total height (h 1); (b) Main human anthropometric variables considered in the human CAD model in this work.
Figure 7. (a) Authors' drawing based on Leonardo da Vinci's "Vitruvian man", indicating proportions of body dimensions to total height (h 1); (b) Main human anthropometric variables considered in the human CAD model in this work.
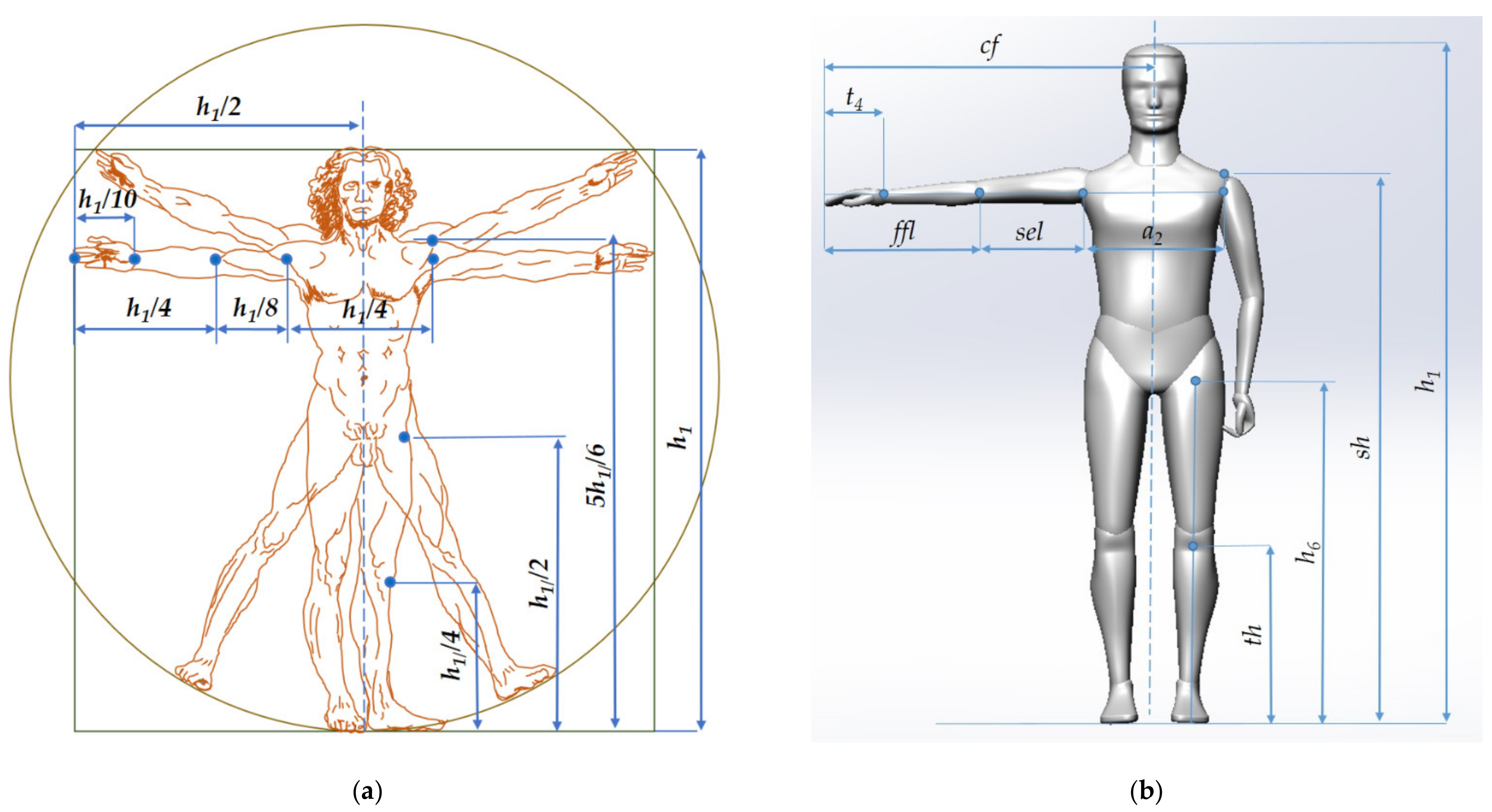
Figure 8. Main dimensions (mm) of the mechanical systems and assessed postures (lateral and frontal view): (a) System 1 (lower piston stroke end); (b) System 2 (upper piston stroke end); (c) System 3 (lower piston stroke end).
Figure 8. Main dimensions (mm) of the mechanical systems and assessed postures (lateral and frontal view): (a) System 1 (lower piston stroke end); (b) System 2 (upper piston stroke end); (c) System 3 (lower piston stroke end).
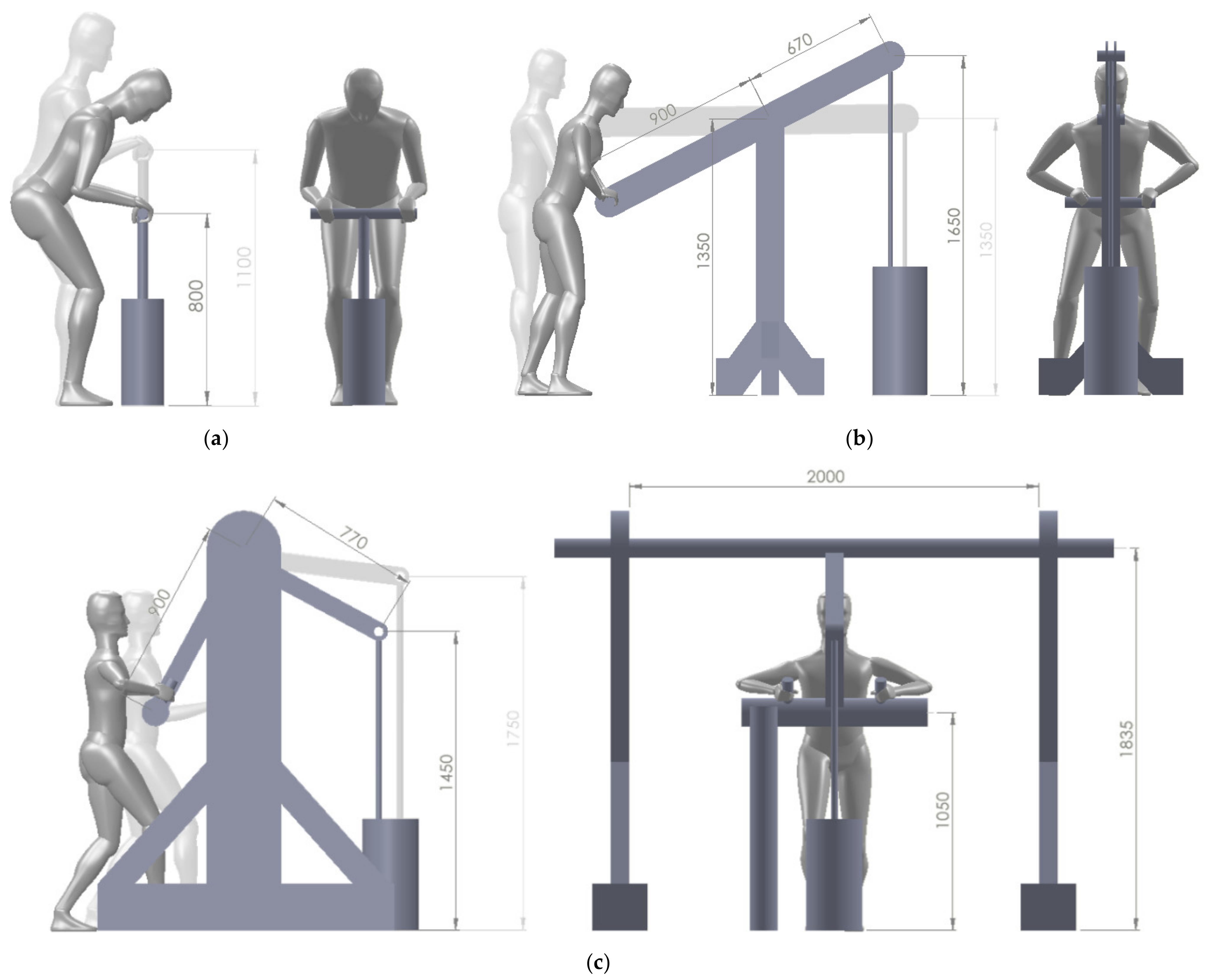
Figure 9. RULA assessment results for: (a) Group A; (b) Group B.
Figure 9. RULA assessment results for: (a) Group A; (b) Group B.
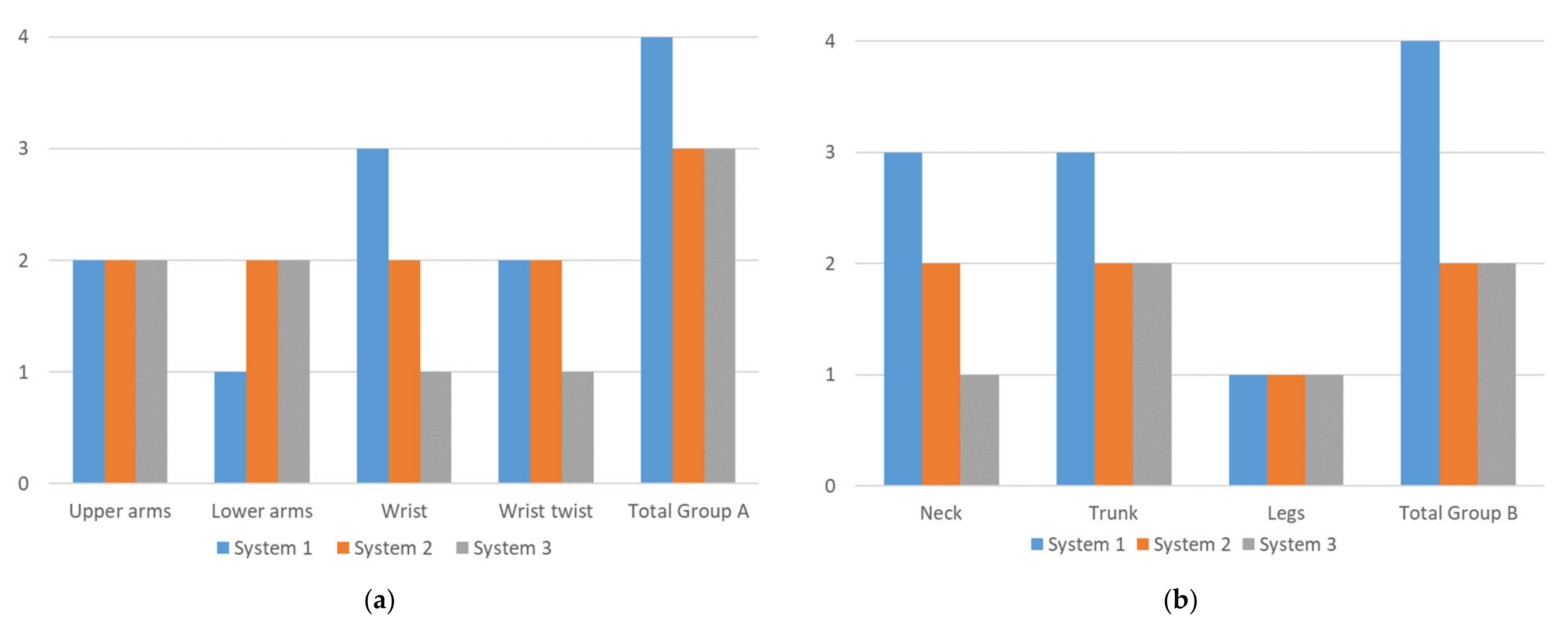
Figure 10. RULA assessment results.
Figure 10. RULA assessment results.
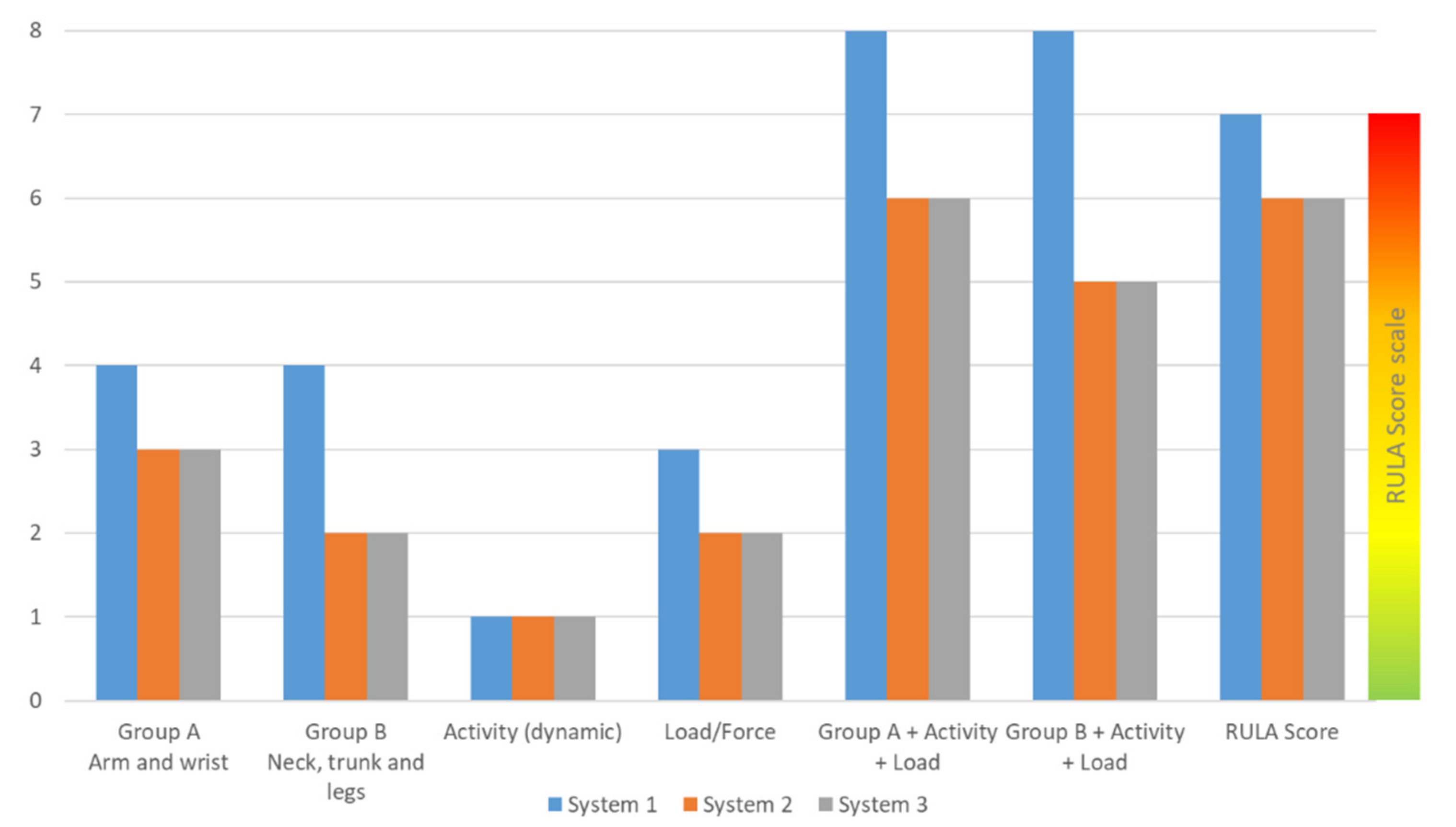
Figure 11. REBA assessment results for: (a) Group A + Load/Force; (b) Group B + Coupling.
Figure 11. REBA assessment results for: (a) Group A + Load/Force; (b) Group B + Coupling.
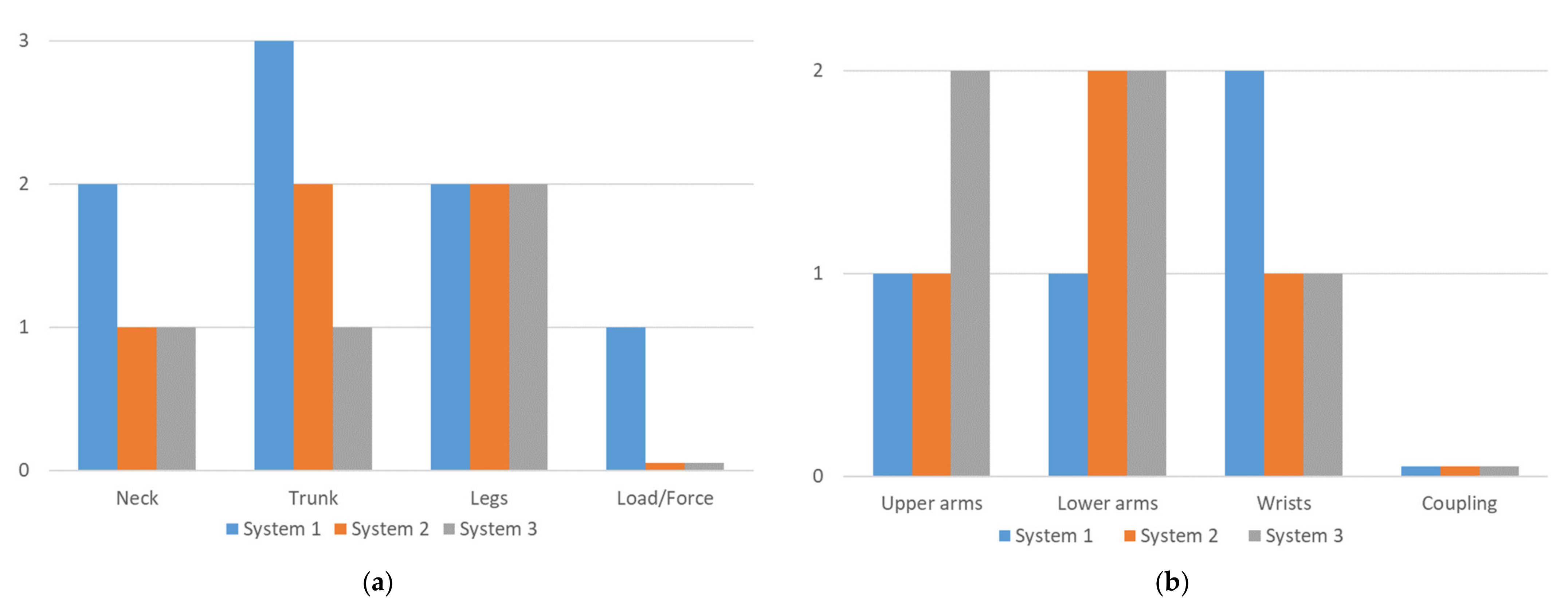
Figure 12. REBA assessment results.
Figure 12. REBA assessment results.
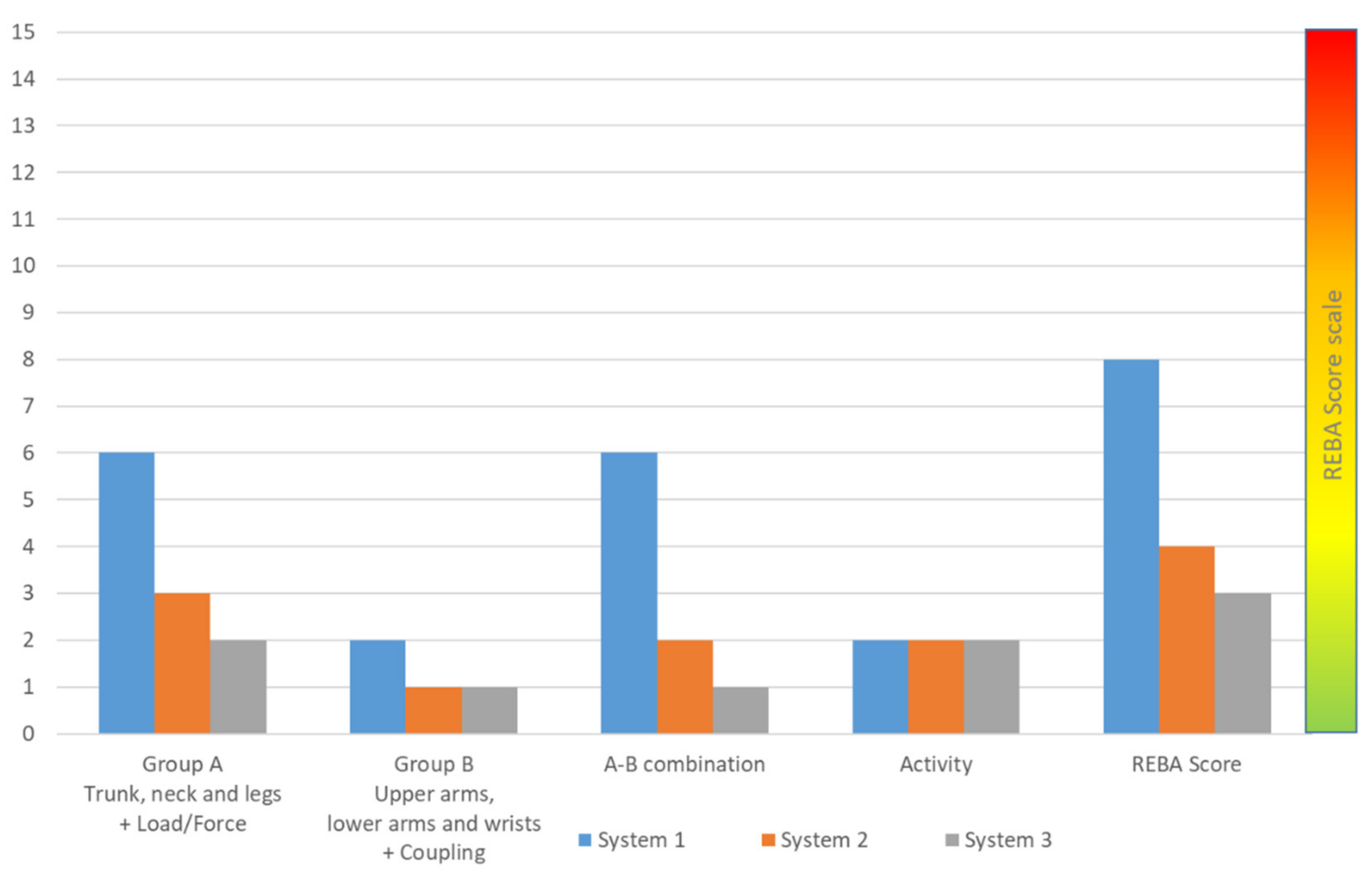
Figure 13. Check List OCRA assessment results.
Figure 13. Check List OCRA assessment results.
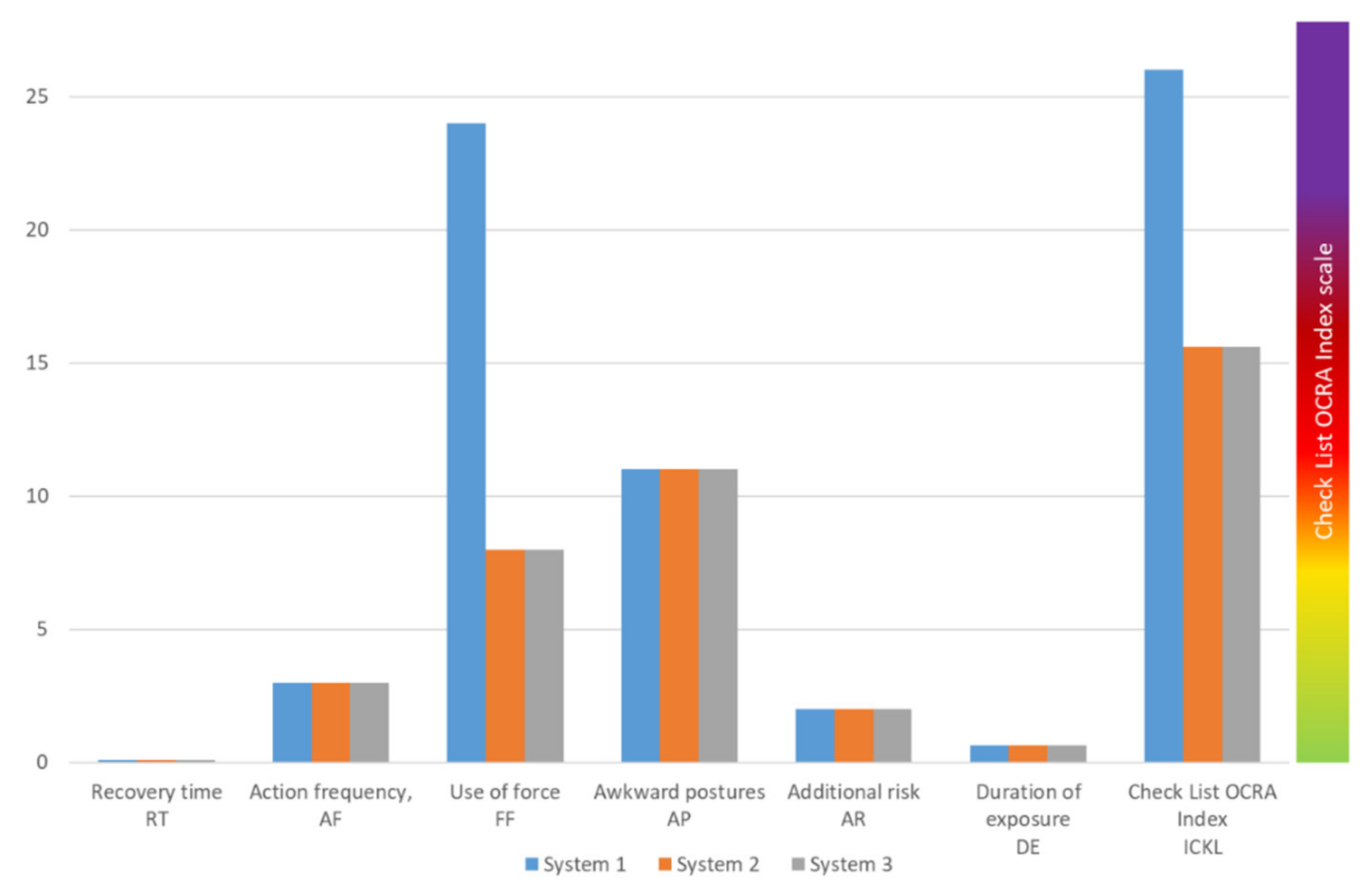
Table 1. Values of the different anthropometric variables considered for the current European population (P50) vs. Vitruvian man canon.
Table 1. Values of the different anthropometric variables considered for the current European population (P50) vs. Vitruvian man canon.
| Body Part | P50 (mm) | Vitruvian Man (mm) |
|---|---|---|
| Body height, h 1 | 1719 | 1719 |
| Shoulder height, sh | 1424 | 1432.50 |
| Crotch height, h 6 | 816 | 859.50 |
| Tibial height, th | 472 | 429.75 |
| Hand length, t 4 | 182 | 171.90 |
| Forearm–fingertip length, ffl | 461 | 429.75 |
| Shoulder–elbow length, sel | 346 | 214.87 |
| Shoulder (biacromial) breadth, a 2 | 360 | 429.75 |
| Chest center–fingertip length, cf | 987 | 859.50 |
Table 2. Starting hypothesis for application of the Check List OCRA method.
Table 2. Starting hypothesis for application of the Check List OCRA method.
| Variable | Value |
|---|---|
| Overall shift duration, SD | 480 min |
| Non repetitive work, NRW | 80 min |
| Breaks, B | 160 min |
| Lunch break, LB | 60 min |
| Number of cycles, NC | 8 |
| Net duration of repetitive work, NDRW | 180 min |
| Net total cycle time, TNC | 1350 s |
Table 3. Assessed risk factors in the OCRA Check List method.
Table 3. Assessed risk factors in the OCRA Check List method.
| Risk Factor |
|---|
| Recovery time, RT |
| Action frequency, AF |
| Use of force, FF |
| Awkward postures, AP |
| Additional risk, AR |
| Duration of exposure, DE |
Table 4. Group A (arm and wrist) scoring sheet for every pump system.
Table 4. Group A (arm and wrist) scoring sheet for every pump system.
| Assessed Element | Assessment | Score | |
|---|---|---|---|
| System 1 | Upper arms | Extension greater than 20° or 20–45° of flexion; No shoulder raising; No arm abduction or supporting; No body leaning | 2 |
| Lower arms | 60–100° flexion; No work across the midline or out to side of body | 1 | |
| Wrist | Flexion or extension greater than 15°; No radial or ulnar deviation | 3 | |
| Wrist twist | Near the end of twisting range | 2 | |
| System 2 | Upper arms | 20–45° flexion; No shoulder raising; No arm abduction or supporting; No body leaning | 2 |
| Lower arms | <60° flexion; No work across the midline or out to side of body | 2 | |
| Wrist | 0–15° in either flexion or extension; No radial or ulnar deviation | 2 | |
| Wrist twist | Near the end of twisting range | 2 | |
| System 3 | Upper arms | 0–20° flexion; No shoulder raising; Arm abduction. No arm supporting; No body leaning | 2 |
| Lower arms | <60° flexion; No work across the midline or out to side of body | 2 | |
| Wrist | Neutral position; No radial or ulnar deviation | 1 | |
| Wrist twist | Mid-range of twist | 1 |
Table 5. Group B (neck, trunk and legs) scoring sheet for every pump system.
Table 5. Group B (neck, trunk and legs) scoring sheet for every pump system.
| Assessed Element | Assessment | Score | |
|---|---|---|---|
| System 1 | Neck | 20° or more flexion; No twisting or side bending | 3 |
| Trunk | 20–60° flexion; No twisting or side bending | 3 | |
| Legs | Standing with the body weight evenly distributed over both feet, with room for changes of position | 1 | |
| System 2 | Neck | 10–20° flexion; No twisting or side bending | 2 |
| Trunk | 0–20° flexion; No twisting or side bending | 2 | |
| Legs | Standing with the body weight evenly distributed over both feet, with room for changes of position | 1 | |
| System 3 | Neck | 0–10° flexion; No twisting or side bending | 1 |
| Trunk | 0–20° flexion; No twisting or side bending | 2 | |
| Legs | Standing with the body weight evenly distributed over both feet, with room for changes of position | 1 |
Table 6. Activity and Load/Force.
Table 6. Activity and Load/Force.
| Assessed Element | Assessment | Score | |
|---|---|---|---|
| System 1 | Activity | Dynamic action repeated more than 4 times/min | 1 |
| Load/Force | 10 kg or more repeated loads or forces | 3 | |
| System 2 | Activity | Dynamic action repeated more than 4 times/min | 1 |
| Load/Force | 2–10 kg repeated loads or forces | 2 | |
| System 3 | Activity | Dynamic action repeated more than 4 times/min | 1 |
| Load/Force | 2–10 kg repeated loads or forces | 2 |
Table 7. RULA assessment results for every pump system.
Table 7. RULA assessment results for every pump system.
| Score | |||
|---|---|---|---|
| System 1 | System 2 | System 3 | |
| Group A. Arm and wrist | 4 | 3 | 3 |
| Group B. Neck, trunk and legs | 4 | 2 | 2 |
| Activity (dynamic) | 1 | 1 | 1 |
| Load/Force | 3 | 2 | 2 |
| Group A + Activity + Load | 8 | 6 | 6 |
| Group B + Activity + Load | 8 | 5 | 5 |
| RULA Score | 7 | 6 | 6 |
| Risk level | 4 | 3 | 3 |
| Action | Investigation and changes are required immediately | Investigation and changes are required soon | Investigation and changes are required soon |
Table 8. Group A (trunk, neck and legs) scoring sheet for every pump system.
Table 8. Group A (trunk, neck and legs) scoring sheet for every pump system.
| Assessed Element | Assessment | Score | |
|---|---|---|---|
| System 1 | Neck | >20° flexion; No twisting or side flexion | 2 |
| Trunk | 20–60° flexion; No twisting or side flexion | 3 | |
| Legs | 30–60° flexion; Bilateral weight bearing | 2 | |
| Load/Force | 5–10 kg; No shock or rapid buildup of force | 1 | |
| System 2 | Neck | 0–20° flexion; No twisting or side flexion | 1 |
| Trunk | 0–20° flexion; No twisting or side flexion | 2 | |
| Legs | 30–60° flexion; Bilateral weight bearing | 2 | |
| Load/Force | <5 kg (considering the mechanical advantage provided by the lever system over system 1); No shock or rapid buildup of force | 0 | |
| System 3 | Neck | 0–20° flexion; No twisting or side flexion | 1 |
| Trunk | Upright; No twisting or side flexion | 1 | |
| Legs | 30–60° flexion; Bilateral weight bearing | 2 | |
| Load/Force | <5 kg (taking into account the mechanical advantage provided by the lever system over system 1); No shock or rapid buildup of force | 0 |
Table 9. Group B (upper arms, lower arms and wrists) scoring sheet for every pump system.
Table 9. Group B (upper arms, lower arms and wrists) scoring sheet for every pump system.
| Assessed Element | Assessment | Score | |
|---|---|---|---|
| System 1 | Upper arms | 20–45° flexion; No shoulder raising; Gravity assisted posture; No arms abduction or rotation | 1 |
| Lower arms | 60–100° flexion | 1 | |
| Wrists | >15° flexion; No wrists deviation or twisting | 2 | |
| Coupling | Well-fitting handle and a mid-range power grip | 0 | |
| System 2 | Upper arms | 20–45° flexion; No shoulder raising; Gravity assisted posture; No arms abduction or rotation. | 1 |
| Lower arms | <60° flexion | 2 | |
| Wrists | <15° flexion; No wrists deviation or twisting | 1 | |
| Coupling | Well-fitting handle and a mid-range power grip | 0 | |
| System 3 | Upper arms | 0–20° flexion. No shoulder raising; No gravity-assisted posture; Arms abduction. No arms rotation | 2 |
| Lower arms | <60° flexion | 2 | |
| Wrists | <15° flexion; No wrists deviation or twisting | 1 | |
| Coupling | Well-fitting handle and a mid-range power grip | 0 |
Table 10. Activity assessment scoring sheet.
Table 10. Activity assessment scoring sheet.
| Assessment | Score | |
|---|---|---|
| Systems 1, 2 and 3 | One or more body parts are static, e.g., held for longer than 1 min; Repeated small range actions, e.g., repeated more than 4 times per minute. No rapid large range changes in postures or an unstable base. | 2 |
Table 11. REBA assessment results for every pump system.
Table 11. REBA assessment results for every pump system.
| Score | |||
|---|---|---|---|
| System 1 | System 2 | System 3 | |
| Group A. Trunk, neck and legs + Load/Force | 6 | 3 | 2 |
| Group B. Upper and lower arms and wrists + Coupling | 2 | 1 | 1 |
| A–B combination | 6 | 2 | 1 |
| Activity | 2 | 2 | 2 |
| REBA score | 8 | 4 | 3 |
| Risk level | High | Medium | Low |
| Action level | 3 | 2 | 1 |
| Action (including further assessment) | Necessary soon | Necessary | May be necessary |
Table 12. Check List OCRA assessment results for every pump system.
Table 12. Check List OCRA assessment results for every pump system.
| Risk Factors | Assessment | Score (Both Sides) | ||
|---|---|---|---|---|
| System | ||||
| 1 | 2 | 3 | ||
| Recovery time, RT | Interruption of at least 8/10 min every hour | 0 | 0 | 0 |
| Action frequency, AF | Dynamic technical actions; Fast arms movement (about 40 actions/min); Short interruptions are possible; No static technical actions | 3 | 3 | 3 |
| Use of force, FF | System 1: The working activity requires intense force (score 5–7 on the Borg scale) about 10% of time or more Systems 2–3: The working activity requires moderate force (score 3–4 on the Borg scale) almost all the time | 24 | 8 | 8 |
| Shoulder | The arms have no support and remain slightly elevated for a little over half the time | 1 | 1 | 1 |
| Elbow | Sudden movements (wide flexion–extension or prone–supination, jerking or striking) | 8 | 8 | 8 |
| Wrist | System 1: Extreme position. Wide flexion almost all the time Systems 2–3: No extreme position or awkward postures (such as wide flexion/extension or wide lateral deviation) | 8 | 0 | 0 |
| Hand-Fingers | Hook grip almost all the time | 8 | 8 | 8 |
| Stereotype | Identical movement of the shoulder and/or elbow/wrist/hands, repeated almost all the time | 3 | 3 | 3 |
| Awkward postures, AP | Assessed from the score for shoulder, elbow, wrist, hands-fingers and stereotype | 11 | 11 | 11 |
| Additional risk, AR | Presence of 2 or more sudden, jerky movements per minute. Tools cause compression of muscle and tendon structures. | 2 | 2 | 2 |
| Duration of exposure, DE | Assessed from the starting hypothesis (Table 3). Net duration of repetitive work, NDRW = 180 min | 0.65 | 0.65 | 0.65 |
| Check List OCRA Index (ICKL) | 26 | 15.6 | 15.6 | |
| Level | Purple | Red | Red | |
| Risk | High | Medium | Medium | |
| Publisher's Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Posted by: dalenedalenestarowicze0273211.blogspot.com
Source: https://www.mdpi.com/2071-1050/13/17/9984/htm
